

-
协作机器人编程与调试
3D机器视觉应用与调试
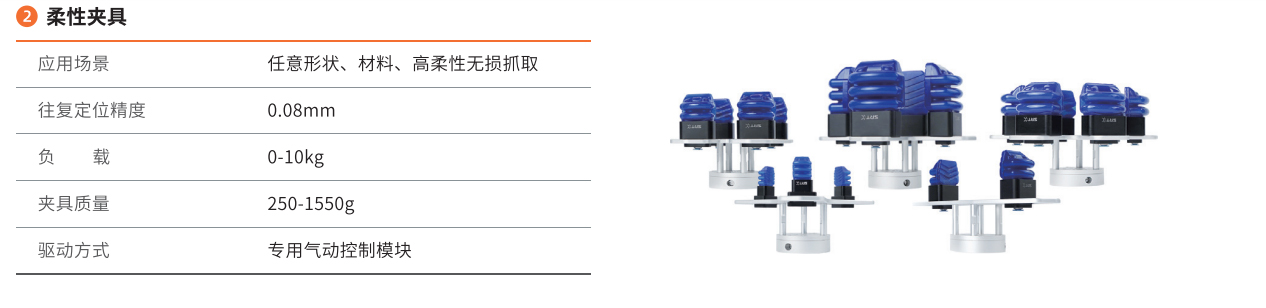
柔性夹具应用与调试
电气控制系统调试

协作机器人系统
柔性组合夹具
3D视觉系统
电气控制系统
智能料库
物品分拣场景
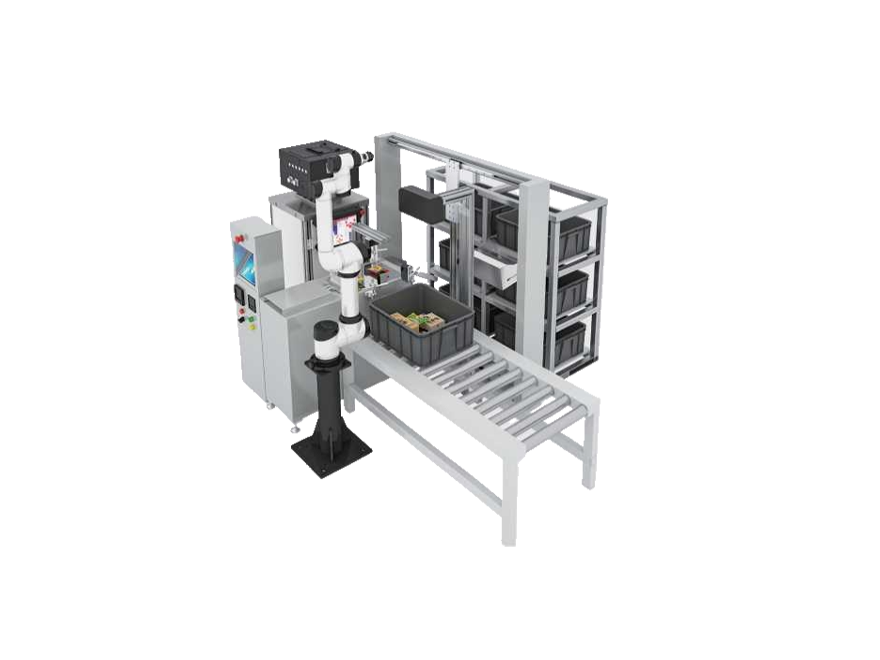
基于3D视觉的智能分拣工作站结合人工智能技术、机器人技术、智能控制技术,包含视觉硬件调试平台、视觉软件开发系统、机器人系统及柔性夹具等模块。可供学生进行3D视觉技术认知、应用、开发等实验。
通过整个平台的建设和操作,可以完成特定任务,如:对杂乱摆放、形状各异和颜色不同的多种物品进行识别、定位、抓取并按要求进行归类存放。另外,不同行业应用可搭配不同柔性夹具应用。

协作机器人编程与调试
3D机器视觉应用与调试
柔性夹具应用与调试
电气控制系统调试
协作机器人系统操作实训
协作机器人坐标系设置实训
协作机器人轨迹编程实训
协作机器人数据通信实训
视觉系统认知实训
视觉设备与控制器通讯实训
视觉算法库及开发工具认知实训
视觉图像特征提取算法开发实训
基于人工智能的3D视觉自学习实训
面向零散点云的拟合与分析方法研究
机器视觉算法功能模块开发
视觉引导下的机器人路径自适应实训
基于3D视觉的不同物品抓取综合实训
柔性夹具安装实训
柔性夹具控制实训
柔性夹具数据集成实训
柔性夹具维护保养实训
协作机器人现场编程
协作机器人工作站系统集成设计
机器视觉检测应用
机器学习
人工智能






